
FFRobotics Ltd. (Israel)
Resumen
El recolector FFRobot proporciona al agricultor una alternativa más eficaz, más eficiente y que ahorra costes de mano de obra, aumentando la rentabilidad de la explotación. Este sistema también ofrece la oportunidad de mejorar en gran medida la producción de fruta, la sostenibilidad del huerto y la seguridad alimentaria con las capacidades de agricultura de precisión al proporcionar los datos de producción y calidad de fruto obtenidos autónomamente durante la cosecha.
En el futuro, el FFRobot también podrá realizar el aclareo de flores, de frutos y la poda, aumentando así su uso a lo largo de la estación e incrementando su rentabilidad. La capacidad de realizar la poda y el aclareo de forma consistente con una máquina robótica y los datos obtenidos mejorarán en gran medida la calidad de la fruta y facilitarán la gestión de las explotaciones, especialmente en lo referido a la mano de obra.
Introducción
Incluso desde que Eva recogiese la primera manzana, según el Antiguo Testamento, toda la fruta fresca (esto es, para consumo directo sin ningún procesamiento o intervención industrial) se ha recogido a mano: alrededor de 120 millones de toneladas de manzanas, peras, cítricos y frutas de hueso se recogen para consumo directo cada año – todo recogido por manos humanas. La recolección representa el mayor coste de producción en frutales, dependiendo de la especie y del sistema de formación puede suponer entre el 25% i el 60% del coste total de producción.
Los agricultores que cultivan árboles frutales en todo el mundo se ven forzados, sin ninguna otra opción, a contratar temporeros cada año, a veces de países extranjeros, para poder recoger la fruta y tenerla disponible en los mercados poco después de su recolección. En todos los países productores de fruta la mano el coste de la mano de obra se ha multiplicado por 2 o por 3 veces en la última década, siendo cada vez más escasa y menos especializada. Es por ello que la producción deberá basarse en sistemas de conducción con copas bidimensionales, de fácil accesibilidad a personas y máquinas. Este tipo de formación estará ya adaptado al siguiente paso: la recolección robotizada. Y es que sin lugar a dudas, este es el paso más importante y el mayor desafío para la fruticultura de los próximos años, que se añadirá al pack tecnológico que hará posible la fruticultura de precisión.
En el presente artículo se presenta la situación de la mano de obra para la recolección, así como las características más destacadas y las prestaciones del recolector FFrobot desarrollado por la empresa israelita FF Robotics.
Problemas que deben afrontar los productores
En la actualidad se sabe perfectamente que los fruticultores vienen experimentando desde hace varios años problemas comunes:
Escasez de trabajadores
- Una escasez grave de trabajadores que, durante ya muchos años, ha forzado a los fruticultores a dejar que las frutas se pudran en los árboles porque no hay personal disponible: sencillamente los antiguos recolectores se retiran y los jóvenes no quiere trabajar en la agricultura, especialmente en la recogida de fruta: es un trabajo rutinario, cansado y aburrido, que requiere pasar muchas horas en escaleras (con el riesgo de caerse), cargar con bolsas pesadas llenas con las frutas que han recogido, llevar con ellos la bolsa al bajar por la escalera y caminar hasta un contenedor central para vaciar la bolsa. Y además con una peor remuneración comparado con otros sectores de la economía y no bien visto socialmente en la mayoría de países.
- La mayor parte de estos recolectores de fruta no son trabajadores permanentes en la granja, y se les vuelve a reclutar otra vez cuando es posible al año siguiente, así que la mayoría de estos temporeros requieren formación antes de la temporada de cosecha, pues se trata de mano de obra muy poco cualificada. Además, las restricciones en las visas de trabajo temporales han aumentado las dificultades de reclutar trabajadores extranjeros.
Coste de la mano de obra
- El coste de reclutar temporeros no para de incrementarse con cada cosecha, y lo mismo ocurre con los costes de transportarlos desde sus países de origen, alojamiento, comida y primas de seguros médicos y de accidentes. No ocurre lo mismo con los precios que perciben los productores, para la mayoría de frutas estables o a la baja.
Rentabilidad de las explotaciones
- Los nuevos trabajadores requiere información al principio de la temporada de cosecha. Los trabajadores sin dicha formación, o incluso con formación, pero sin una amplia experiencia en recolección, tienen un efecto negativo en el volumen de fruta recogida y en la calidad de la fruta que recogen – lo que se traduce en una mayor coste y una menor rentabilidad para el agricultor.
- Los trabajadores son subjetivos, y sus decisiones sobre la cosecha pueden están influidas por la hora del día, el estado de ánimo y otros factores. La calidad de la fruta recogida por ellos a menudo es poco consistente – lo que implica menos beneficio para el agricultor, especialmente en variedades de alto valor añadido.
- Como resultado directo de la ya mencionada escasez de trabajadores/trabajadores experimentados, a menudo no se recoge la fruta tiempo, algo que es un factor clave para su calidad, por lo que la rentabilidad se verá de nuevo afectada negativamente.
- Por último, pero no menos importante, un trabajador sin experiencia/recién formado no podrá alcanzar el volumen de recogida de fruta óptimo, reduciendo los ingresos posibles por vender más fruta.
La recolección completamente robotizada como solución
El FFRobot recolector (Figura 1) es un sistema integrado autopropulsado que recoge la fruta de los árboles y la lleva directamente a los palots. El sistema consta de tres componentes principales – una plataforma híbrida que proporciona energía, mueve la máquina y maneja los palots; una estructura de 12 brazos robóticos independientes, seis a cada lado de la plataforma con sistemas de detección e inteligencia artificial para recolectar la fruta; y un sistema integrado de transporte de la fruta y rellenado de palots. La máquina es completamente automática y autónoma mientras se realiza la cosecha en el huerto. Por razones de seguridad, hay un supervisor en la máquina en caso de mal funcionamiento y para colocar la máquina en las filas de árboles.

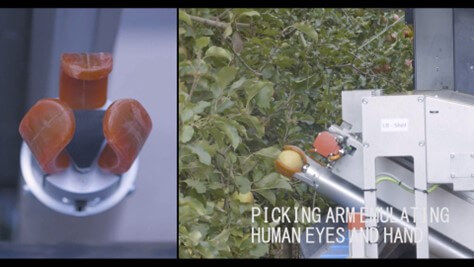
En el extremo de cada brazo robótico hay una pinza para coger la fruta, girarla y cortar el pedúnculo dependiendo del tipo de fruta (Figuras 2 y 3). La pinza está guiada por un sistema de cámaras, un sofisticado procesamiento de imagen e inteligencia artificial/red neuronal que garantiza que se puede acceder y recolectar la fruta sin dañarla y que solo se recoge la fruta objetivo en base a las especificaciones de calidad establecidas para cada variedad y huerto.

Funcionalidad
El supervisor conduce al recolector FFRobot hasta el principio de la hilera de árboles y está situado de pie frente a una interlínea de árboles (normalmente 2 árboles, dependiendo de la estructura de un muerto) en la fila, a ambos lados de la plataforma (Figura 4).

Guiado por un sofisticado procesamiento de imagen/visión y un software de inteligencia artificial y algoritmos de vanguardia, el FFRobot, usando múltiples cámaras y sensores, realiza fotos de la sección de árboles a ambos lados del FFRobot, analiza las fotos, identifica la ubicación de las frutas en los árboles, evalúa los obstáculos potenciales que puedan impedir la recogida de fruta de calidad, determina – en base a los criterios que el agricultor introduce previamente en el sistema informático de FFRobot -el tamaño y el color de las frutas, selecciona las que deben recogerse de acuerdo a estos criterios, y finalmente da instrucciones a cada brazo robótico para moverse hacia una fruta concreta y recogerla. Los doce brazos operan simultáneamente para recoger fruta con una alta tasa de eficiencia en la localización y un elevado rendimiento en la recolección.
En cuanto la pinza recoge la fruta, cada brazo se retrae hacia la base del FFRobot y coloca la fruta con suavidad en una cinta transportadora, que lleva la fruta hacia el palot situado en el fondo de la plataforma. Ésta incluye tres palots, y cuando uno se llena la plataforma lo deja suavemente en el suelo por la parte trasera (Figura 5) y lo reemplaza por uno nuevo vacío. Tras recoger la fruta de los árboles a ambos lados de la plataforma, ésta se mueve automática y autónomamente girando e iniciando la siguiente interlínea donde comienza de nuevo el procedimiento anteriormente descrito para continuar con la cosecha (Figura 5).

Especificaciones de trabajo de FFRobotics
El rendimiento final del recolector FFRobot con sus 12 brazos robóticos es de 9.000 frutos/h, lo que equivale a 1.400-1.500 kg/h de manzanas) y supone alrededor de 10 veces más que la producción media recolectada por un recolector humano hábil (rendimiento medio de entre 130-190 kg/h). Por lo tanto el rendimiento de FFrobot equivaldría a 10 trabajadores trabajando en una plataforma automotriz (Figura 4). El recolector FFRobot puede trabajar 20 horas al día (funciona también por la noche con luz artificial montada en la plataforma), consiguiendo así un rendimiento en torno a los 30.000 kg de fruta recolectada al día.
El recolector FFRobot normalmente logra localizar y recolectar en torno al 90% de la fruta en cada árbol de un huerto configurado con un muro frutal, con un porcentaje bastante bajo de fruta dañada (5%), similar al de la recolección humana convencional. Para optimizar su eficiencia en la localización de los frutos por su sistema de visión artificial, es imprescindible disponer de sistemas de formación basados en copas bidimensionales y muros frutales lo más estrechos posible y con frutos de óptima accesibilidad a las pinzas recolectoras.
Durante el proceso de recogida, el FFRobot reunirá datos y los almacenará para futuras referencias del agricultor: número total de frutas y fruta recogida por árbol, fila, rendimiento/ha y huerto, mapa de producción de cada parcela y estructura de los árboles. Estos datos son de máximo interés dado que pueden utilizarse como guía para futuras mejoras en la gestión de huerto (poda, abonado, tratamientos fitosanitarios, etc.) con el fin de proporcionar una fruta de mejor calidad y mejoras en la sostenibilidad en el uso de los inputs.



